Catégories
Liens
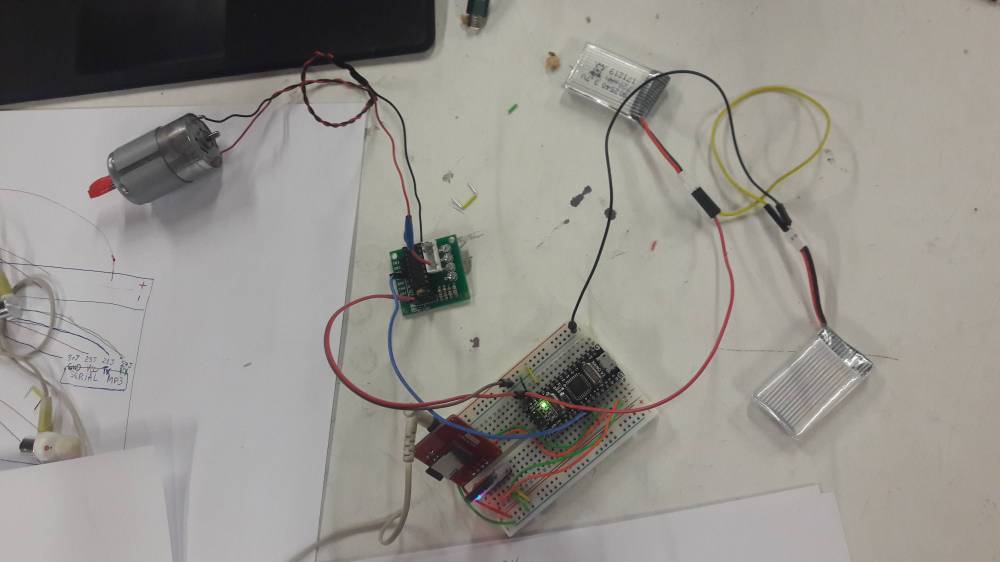
synchronisation le son au mouvement


/* Projet Miracle - Jérôme Kdiajanian * Code : Reso-nance numérique (+ Open-Smart Demo) * 29/01/2018 * System : Android with "Arduino Bluetooth Controller App" > send "A" or "B" caracter > HC-05 Bluetooth > Arduino UNO > Open Smart Serial MP3 player + ULN2003 driver > DC motor * * Wiring : * Serial MP3 Player A | Arduino UNO R3// * RX | 7 * TX | 8 * VCC | 5V * GND | GND * Bluetooth HC-05 * TX | 11 * RX | 10 * Driver ULN2003 | 5 */ #include <SoftwareSerial.h> // MP3 pins #define ARDUINO_RX 8 //should connect to TX of the Serial MP3 Player module #define ARDUINO_TX 7 //connect to RX of the module SoftwareSerial myMP3(ARDUINO_RX, ARDUINO_TX); // HC-05 pins #define rxPin 11 // Broche 11 Arduino en tant que RX --- TX du HC-05 #define txPin 10 // Broche 10 Arduino en tant que TX --- RX du HC-05 SoftwareSerial BTserial(rxPin, txPin); // RX | TX // ULN 2003 (dc motor) pin int motorpin = 5; // Command Strings to "Arduino Bluetooth Controller App" String state; String A = "128"; // nothing (test) String B = "120"; static int8_t Send_buf[6] = {0} ; /************Command byte**************************/ /*basic commands*/ #define CMD_PLAY 0X01 #define CMD_PAUSE 0X02 #define CMD_NEXT_SONG 0X03 #define CMD_PREV_SONG 0X04 #define CMD_VOLUME_UP 0X05 #define CMD_VOLUME_DOWN 0X06 #define CMD_FORWARD 0X0A // >> #define CMD_REWIND 0X0B // << #define CMD_STOP 0X0E #define CMD_STOP_INJECT 0X0F//stop interruptting with a song, just stop the interlude /*5 bytes commands*/ #define CMD_SEL_DEV 0X35 #define DEV_TF 0X01 #define CMD_IC_MODE 0X35 #define CMD_SLEEP 0X03 #define CMD_WAKE_UP 0X02 #define CMD_RESET 0X05 /*6 bytes commands*/ #define CMD_PLAY_W_INDEX 0X41 #define CMD_PLAY_FILE_NAME 0X42 #define CMD_INJECT_W_INDEX 0X43 /*Special commands*/ #define CMD_SET_VOLUME 0X31 #define CMD_PLAY_W_VOL 0X31 #define CMD_SET_PLAY_MODE 0X33 #define ALL_CYCLE 0X00 #define SINGLE_CYCLE 0X01 #define CMD_PLAY_COMBINE 0X45//can play combination up to 15 songs void sendCommand(int8_t command, int16_t dat ); void setup() { myMP3.begin(9600); delay(500);//Wait chip initialization is complete // HC05 pinMode(rxPin, INPUT); pinMode(txPin, OUTPUT); BTserial.begin(38400); // serial bluetooth sendCommand(CMD_SEL_DEV, DEV_TF);//select the TF card delay(200);//wait for 200ms pinMode(motorpin, OUTPUT); } void loop() { while(BTserial.available()) { state = BTserial.read(); if(state == B) { playWithVolume(0XFF01); //play the first song with volume accel_motor(); delay(1000); //wait } else if(state == A) { // nothing } } } void setVolume(int8_t vol) { mp3_5bytes(CMD_SET_VOLUME, vol); } void playWithVolume(int16_t dat) { mp3_6bytes(CMD_PLAY_W_VOL, dat); } /*cycle play with an index*/ void cyclePlay(int16_t index) { mp3_6bytes(CMD_SET_PLAY_MODE,index); } void setCyleMode(int8_t AllSingle) { mp3_5bytes(CMD_SET_PLAY_MODE,AllSingle); } void playCombine(int8_t song[][2], int8_t number) { if(number > 15) return;//number of songs combined can not be more than 15 uint8_t nbytes;//the number of bytes of the command with starting byte and ending byte nbytes = 2*number + 4; int8_t Send_buf[nbytes]; Send_buf[0] = 0x7e; //starting byte Send_buf[1] = nbytes - 2; //the number of bytes of the command without starting byte and ending byte Send_buf[2] = CMD_PLAY_COMBINE; for(uint8_t i=0; i < number; i++)// { Send_buf[i*2+3] = song[i][0]; Send_buf[i*2+4] = song[i][1]; } Send_buf[nbytes - 1] = 0xef; sendBytes(nbytes); } void sendCommand(int8_t command, int16_t dat = 0) { delay(20); if((command == CMD_PLAY_W_VOL)||(command == CMD_SET_PLAY_MODE)||(command == CMD_PLAY_COMBINE)) return; else if(command < 0x10) { mp3Basic(command); } else if(command < 0x40) { mp3_5bytes(command, dat); } else if(command < 0x50) { mp3_6bytes(command, dat); } else return; } void mp3Basic(int8_t command) { Send_buf[0] = 0x7e; //starting byte Send_buf[1] = 0x02; //the number of bytes of the command without starting byte and ending byte Send_buf[2] = command; Send_buf[3] = 0xef; // sendBytes(4); } void mp3_5bytes(int8_t command, uint8_t dat) { Send_buf[0] = 0x7e; //starting byte Send_buf[1] = 0x03; //the number of bytes of the command without starting byte and ending byte Send_buf[2] = command; Send_buf[3] = dat; // Send_buf[4] = 0xef; // sendBytes(5); } void mp3_6bytes(int8_t command, int16_t dat) { Send_buf[0] = 0x7e; //starting byte Send_buf[1] = 0x04; //the number of bytes of the command without starting byte and ending byte Send_buf[2] = command; Send_buf[3] = (int8_t)(dat >> 8);//datah Send_buf[4] = (int8_t)(dat); //datal Send_buf[5] = 0xef; // sendBytes(6); } void sendBytes(uint8_t nbytes) { for(uint8_t i=0; i < nbytes; i++)// { myMP3.write(Send_buf[i]) ; } } // fonction motor a retravailler en fonction du résultat voulu avec le moteur .... void accel_motor() { for (int pwm=0; pwm <= 150; pwm++){ // 1ere acceleration vitesse moyenne analogWrite(motorpin,pwm); delay(10); } delay(2000); // pause : reste 2 sec en vitesse moyenne for (int pwm=150; pwm <= 255; pwm++){ // 2eme acceleration vitesse max analogWrite(motorpin,pwm); delay(5); } delay(3000); // pause : reste 3 sec vitesse max digitalWrite(motorpin, LOW); // vitesse zero delay(300); // eteint pendant 300 msec }